


“하이엔드를 요구하는 모바일에서는 eMMC의 자리를 UFS가 대체할 것이다” 28일 양재 엘타워에서 한국반도체산업협회(KSIA)와 JEDEC의 주최로 열린 ‘모바일& IoT 포럼 2017에 참가한 삼성전자, LG전자, 화웨이, 마이크론, 미디어텍, 시높시스 등의 관계자들은 차세대 모바일 메모리 기술의 방향이 UFS가 될 거라고 내다봤다. UFS는 모바일 기기용으로 개발된 낸드플래시 메모리 솔루션으로 현재 대부분의 스마트폰에 쓰이는 eMMC5.0(임베디드 멀티미디어 카드)보다 약 3배의 읽기 속도를 내며 소비 전력이 절반 수준으로 효율이 높다고 평가되고 있다.
2017-08-01 09:51:53by 김지혜 기자
일렉트로비트가 시높시스의‘디자인웨어 ARC EM/HS FS 프로세서 전용 ‘EB 트레소스 클래식 오토사 소프트웨어를 출시했다. 이 소프트웨어는 자동차 반도체 기업, 자동차 및 자동차 부품 제조사가 오토사 표준을 기반으로 전장품 소프트웨어 애플리케이션을 신속히 개발할 수 있도록 지원하는 하드웨어-소프트웨어 플랫폼을 제공한다.
2020-09-08 10:04:47by 명세환 기자
개발 필수요소로 자리잡은 오픈소스에 대한 포괄적인 이해 및 지속적인 관리 방안 구축이 중요하다는 전문가의 의견이 제시됐다. 글로벌 애플리케이션 보안 분야 시높시스코리아는 30일 'OSSRA(Open Source Security and Risk Analysis, 오픈 소스 보안 및 위험 분석)' 보고서를 발표하며, 오픈소스 생태계에 대한 논의 및 비즈니스 방향 및 전략을 설명하기 위한 온라인 간담회를 진행했다.
2022-06-30 16:14:29by 김예지 기자

앤시스가 시높시스와 협력해 삼성전자 파운드리 사업부와 함께 14LPU 공정 기술을 위해 개발한 무선 주파수 집적 회로(RFIC) 설계를 위한 새로운 레퍼런스 플로우(reference flow)를 출시했다.
2023-10-16 12:33:07by 배종인 기자

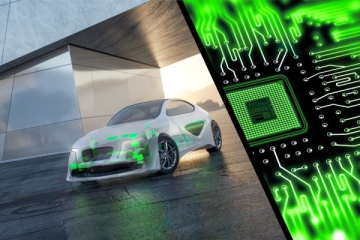
차량 네트워크 및 임베디드 시스템 분야의 글로벌 기업 벡터코리아(지사장 장지환, Vector)가 시높시스(Synopsys)와의 협력을 통해 소프트웨어 정의 차량(SDV) 개발을 위한 가상 ECU(vECU) 기반 통합 솔루션을 발표했다. 벡터의 ‘MICROSAR Classic’과 시높시스의 ‘Synopsys Silver’를 통합 제공함으로써, 실제 하드웨어 없이도 초기 개발 단계부터 ECU를 생성하고 테스트할 수 있는 환경을 구현했다.
2025-10-14 08:53:33by 배종인 기자
시높시스가 엔비디아 GTC 2026에서 AI와 고성능 컴퓨팅을 결합한 엔지니어링 성과를 공개했다. 반도체 설계와 멀티피직스 시뮬레이션, 디지털 트윈을 하나의 흐름으로 묶어 개발 시간을 줄이고 비용을 낮추는 방향이다. 어플라이드 머티리얼즈, 혼다, 아스테라 랩스, ADI 사례를 통해 반도체 소재 해석, 차량 유체 해석, 칩 검증, 로봇 센서 시뮬레이션 등 실제 적용 범위도 제시했다. 업계에서는 칩 설계가 열·기계적 문제까지 함께 다뤄야 하는 단계로 넘어가면서 EDA와 물리 시뮬레이션의 결합이 빨라지고 있다.
2026-03-19 08:59:20by 배종인 기자
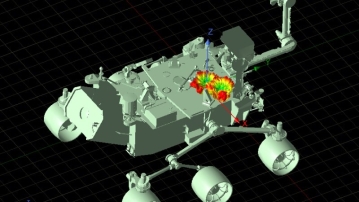
글로벌 반도체 설계 소프트웨어 기업 시높시스(Synopsys)가 최근 NASA와 협력해 달 탐사용 우주복의 안전성 분석과 차세대 달 통신 인프라 구축을 위한 기술 지원을 확대하고 있다.
2026-04-17 08:21:17by 배종인 기자
