

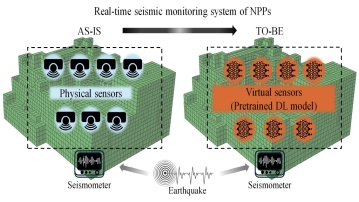
UNIST(울산과학기술원)와 한국표준과학연구원(KRISS, Korea Research Institute of Standards and Science)이 공동 개발한 AI 기반 가상 센서 기술이 단일 센서만으로 원전 내 139개 지점의 지진 피해를 예측할 수 있는 모델을 구현했다. 기존 센서망 구축 없이도 실시간 모니터링이 가능해 점검 효율성과 안전성이 크게 향상될 전망이다.
2025-10-01 08:59:36by 명세환 기자

UNIST 인공지능대학원 연구팀이 르네상스 화가들의 ‘소실점’ 개념을 인공지능에 접목해, 카메라 영상의 원근 왜곡을 보완하는 AI 모델 ‘VPOcc’를 개발했다. 이번 연구는 과학기술정보통신부와 한국연구재단의 지원을 받아 수행됐으며, 성과는 지능형 로봇 분야 국제학회인 IROS 2025에 채택됐다.
2025-10-15 16:03:29by 명세환 기자

울산과학기술원(UNIST) 인공지능대학원 윤성환 교수 연구팀이 무선 이미지 전송의 효율을 획기적으로 높이는 AI 기술을 개발했다. 연구팀이 개발한 ‘과제 맞춤형 의미통신(Task-Adaptive Semantic Communication)’ 기술은 이미지 전체를 압축해 전송하는 기존 방식과 달리, 과제 수행에 꼭 필요한 의미 정보만을 선별해 전송하는 방식이다.
2025-11-06 13:49:28by 배종인 기자

UNIST(총장 박종래)가 산·학·연 6개 기관과 함께 24일 서울 포스코센터에서 ‘2025 Korea Industrial AI 공동포럼’을 개최하며, 제조업 현장에서의 AI 활용성과와 기업 인재혁신 사례를 공유했다.
2025-11-25 15:47:12by 배종인 기자
UNIST 인공지능대학원 심재영 교수팀이 자율주행차·로봇 등 첨단 산업의 핵심인 3D 인공지능(AI) 모델 학습 효율을 극대화할 수 있는 데이터 증류(dataset distillation) 기술을 개발했다.
2025-12-01 08:16:39by 배종인 기자
.jpg)
UNIST 인공지능대학원 주경돈 교수 연구팀이 3D 가우시안 스플래팅(3D Gaussian Splatting) 기반으로 생성된 3D 캐릭터의 자세를 형태 왜곡 없이 변형하는 AI 모델 ‘디폼스플랫(DeformSplat, Rigidity-aware 3D Gaussian Deformation)’을 개발했다. 이 기술은 기존 3D 콘텐츠 제작 과정에서 필수적으로 요구되던 다각도 촬영 데이터나 복잡한 모션 캡처 장비 없이도 자연스러운 3D 동작을 구현할 수 있어, 메타버스·게임·애니메이션 산업 전반의 제작 비용과 진입 장벽을 크게 낮출 것으로 기대된다.
2025-12-26 09:28:44by 명세환 기자

UNIST 연구진이 전기가오리(Electric Ray)의 생체 구조를 모방해 외부 자극 없이도 고전압을 생산하는 새로운 전기셀 기술을 개발했다. 이 기술은 웨어러블 전원 장치, 자가발전형 센서 등 차세대 에너지 하베스팅 분야의 핵심 기반 기술로 주목받고 있다.
2026-01-21 08:40:38by 배종인 기자
