
.jpg)
UNIST 에너지화학공학과 양창덕 교수팀이 창문이나 모바일 기기 화면을 ‘투명 발전소’로 활용할 수 있는 반투명 유기태양전지를 개발했다. 이번 연구에서는 10.81% 이상의 광전변환효율과 45.43%의 가시광선 투과율을 기록하는 태양전지가 탄생해, 기존 태양전지의 어두운 외관 문제를 획기적으로 개선하는 동시에, 높은 투명도를 유지하면서 전력을 생산할 수 있는 가능성을 제시한다.
2025-06-16 14:10:08by 배종인 기자
UNIST(울산과학기술원) 에너지화학공학과 이재성·석상일·장지욱 교수팀이 태양에너지를 물 분해로 전환해 그린 수소를 직접 생산하는 모듈형 인공나뭇잎(인공광합성) 기술을 상용화 가능 단계로 끌어올렸다.
2025-06-23 15:01:36by 배종인 기자

울산과학기술원(UNIST)이 저전력·고속 연산이 가능한 AI 메모리 반도체 실현을 위한 차세대 소재로 주목받는 ‘교자성체(RuO₂)’를 기반으로 자기 터널 접합(MTJ) 소자를 개발해 세계 최초로 터널 자기저항(TMR)의 반전을 관측했다.
2025-07-04 14:51:28by 배종인 기자
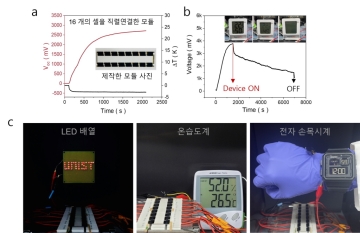
울산과학기술원(UNIST) 장성연 교수 연구팀이 체온만으로 AA 건전지 수준의 전압을 생성할 수 있는 고성능 n형 고체 열갈바닉 전지를 세계 최초로 개발했다. 이 기술은 배터리 없이 작동하는 웨어러블 기기 및 사물인터넷(IoT) 센서의 상용화를 앞당길 수 있는 획기적인 성과로, 영국왕립화학회(RSC) 학술지 ‘Energy & Environmental Science’에 7월7일자로 게재됐다.
2025-08-20 16:25:25by 배종인 기자
.jpg)
UNIST(울산과학기술원) 에너지화학공학과 강석주 교수, 고려대학교 곽상규 교수, 한국과학기술연구원(KIST) 안석훈 박사 공동 연구팀은 흑연과 곡면 나노그래핀을 결합한 하이브리드 음극 소재를 개발했다. 이 소재는 고속 충전 시에도 배터리 성능과 수명을 안정적으로 유지할 수 있는 구조를 갖췄다.
2025-09-24 08:45:25by 배종인 기자
울산과학기술원(UNIST) 화학과 바르토슈 그쥐보프스키 교수 연구팀이 인공지능(AI)과 로봇을 활용해 하루 1,000회 이상의 화학 실험을 자동으로 수행할 수 있는 ‘AI·로봇 기반 자동화 실험 플랫폼’을 개발했다고 25일 밝혔다. 이 기술은 복잡한 화학 반응 네트워크를 정밀하게 맵핑하고, 새로운 화학 합성물을 빠르게 생성할 수 있어 신약 개발과 신소재 발굴에 획기적인 전환점을 마련할 것으로 기대된다.
2025-09-25 08:53:55by 명세환 기자
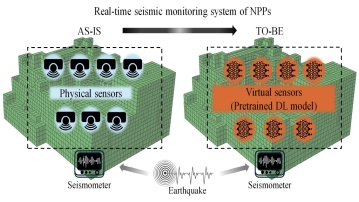
UNIST(울산과학기술원)와 한국표준과학연구원(KRISS, Korea Research Institute of Standards and Science)이 공동 개발한 AI 기반 가상 센서 기술이 단일 센서만으로 원전 내 139개 지점의 지진 피해를 예측할 수 있는 모델을 구현했다. 기존 센서망 구축 없이도 실시간 모니터링이 가능해 점검 효율성과 안전성이 크게 향상될 전망이다.
2025-10-01 08:59:36by 명세환 기자
