.png)
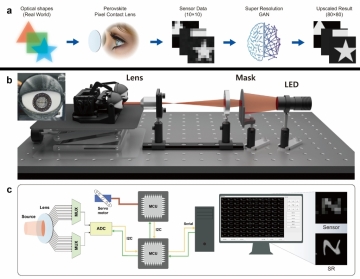
UNIST 기계공학과 정임두 교수 연구팀이 눈동자 움직임만으로 로봇팔을 제어할 수 있는 스마트 콘택트렌즈를 개발했다. 렌즈 표면에 직접 구현한 100개의 광센서가 시선 변화를 읽고, AI가 이를 고해상도 정보로 복원해 제어 신호로 바꾸는 방식이다. 연구 결과는 2026년 3월 Advanced Functional Materials에 게재됐으며, 안구 모형 실험에서는 9개 방향 시선 제스처를 99.3% 정확도로 인식했다.
2026-04-15 16:41:38by 배종인 기자
UNIST가 5월 6일 이창호 국수와 이세돌 UNIST 특임교수가 참여하는 공개 토크콘서트를 연다. 이번 행사는 AI 시대 인간의 판단력과 창의성, 끈기를 주제로 진행되며, 신설된 GRIT인재융합학부의 교육 방향을 소개하는 자리로 마련된다.
2026-04-29 11:30:42by 명세환 기자
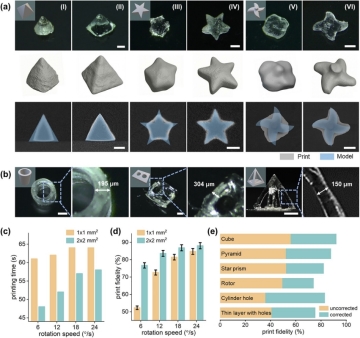
UNIST 정임두 교수팀이 액적 내부에서 구조물을 한 번에 경화하고 배출하는 디스펜싱 체적 적층 제조 기술을 개발했다. 연구 결과는 지난 3월 21일 Advanced Functional Materials에 게재됐으며, 연구팀은 약 60초 단위로 서로 다른 마이크로 구조물을 연속 제작하는 실험 결과를 제시했다.
2026-04-29 13:29:33by 명세환 기자
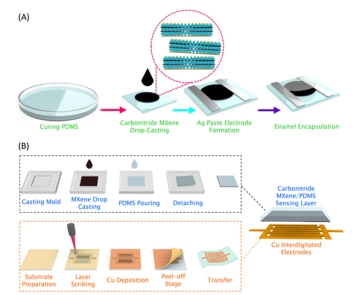
UNIST 연구진이 피부에 부착해 체온, 맥박, 기침 등 미세한 생체 신호를 감지할 수 있는 맥신 기반 센서 소재를 개발했다. 새 소재는 기존 맥신보다 온도 변화와 압력 자극에 대한 민감도가 각각 3배, 4배 이상 높아졌다. 연구팀은 질소를 포함한 탄질화물 구조를 활용해 감지 성능을 개선했으며, 웨어러블 헬스케어와 전자피부, 인간-기계 인터페이스 분야 활용 가능성을 제시했다.
2026-05-11 14:51:07by 명세환 기자
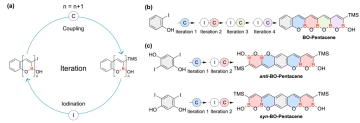
UNIST 연구진이 유기반도체 펜타센의 분자 골격에 보론-산소 결합을 반복적으로 삽입하는 합성법을 개발했다. 기존에는 분자 골격 외부에 작용기를 붙여 물성을 조절하는 방식이 주를 이뤘지만, 이번 연구는 골격 자체를 단계적으로 바꿀 수 있다는 점에서 차별화된다. 연구팀은 결합 배열이 다른 펜타센 유도체 3종을 합성했으며, 모두 0.70 이상의 형광 양자수율을 확인했다.
2026-05-18 15:23:33by 배종인 기자
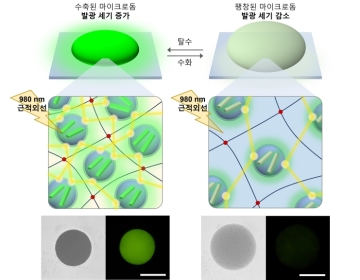
UNIST 연구진이 수분에 따라 발광 세기가 달라지는 상향변환 나노입자 기반 광소재를 개발했다. 이 소재는 건조 상태에서 젖은 상태보다 7배 이상 밝게 빛난다. 연구진은 하이드로젤 내부에서 근적외선이 오래 머물도록 구조를 설계해 발광 강도를 높였으며, 이를 활용해 숨겨진 정보 표시와 QR 코드 인식 기술을 시연했다.
2026-05-20 11:22:34by 배종인 기자
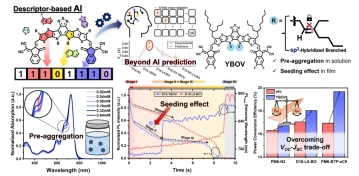
UNIST와 성균관대학교 공동연구팀이 친환경 용매 공정에서도 19.67%의 광전변환효율을 기록한 유기태양전지를 개발했다. 연구팀은 새롭게 설계한 전자받개 분자 ‘YBOV’가 용액 상태에서 서로 응집하며 박막 내부 분자 배열을 정돈시키는 현상을 확인했다. 이 과정은 기존 AI 모델이 반영하지 못한 집단적 물리 현상으로 분석됐다. 연구진은 이번 결과가 유기태양전지 설계에서 분자 구조뿐 아니라 용액 상태의 집합 거동까지 고려해야 한다는 점을 보여준다고 설명했다.
2026-05-21 12:01:00by 배종인 기자
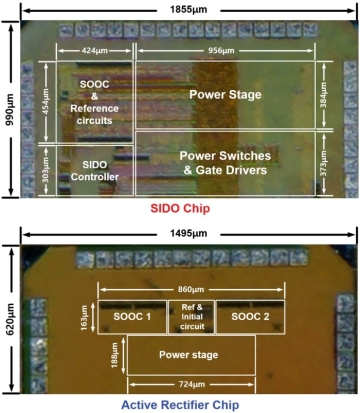
UNIST 연구팀이 체내 삽입형 의료기기의 무선 충전 효율을 높이는 반도체 칩 기술을 개발했다. 기기 내부 회로의 부하 상태에 따라 전력 전달 경로를 바꿔 전력 손실과 발열을 줄이는 방식이다. 심박동기나 신경자극기처럼 장기간 체내에서 동작하는 의료기기의 배터리 수명 연장과 교체 수술 부담 완화에 활용될 수 있을 것으로 기대된다. 연구 결과는 IEEE Transactions on Very Large Scale Integration Systems에 온라인 공개됐다.
2026-05-27 13:20:15by 배종인 기자
